Chassis and Running Gear
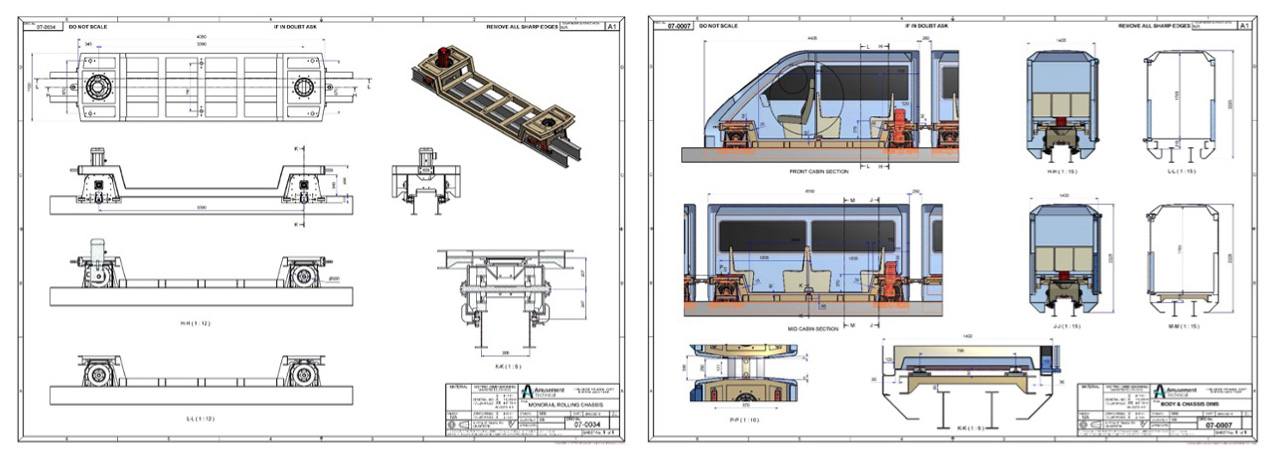
The chassis is designed to be of a common size for both carriage variants. The chassis sits on two-wheel carrier assemblies, one at each end, attached to the chassis by slewing rings. This means that different track profiles can be accommodated by only making a revision to the wheel carrier without impacting on the chassis.
The chassis itself is designed as a step frame arrangement, thus allowing very low access into the trains and keeping the centre of gravity as low as possible.
Chassis and wheel carriers were subjected to detailed finite element analysis.
Each carriage is driven at one end by a vertically mounted 5.5Kw motor with a helical bevel gearbox, the drive wheels are mounted on an axle passing straight through the hollow shaft output.
The wheel carrier is designed to have minimum clearance between the outer shell and the track so as to mitigate against the effects of a tyre failure, it also provides a simple gauge of tyre wear.
Control system
The control system is designed around the following basic principles:
- Each motor has its own variable frequency drive, drive to receive all signals via fieldbus (Ethernet IP)
- Minimum connection between adjacent carriages, in the end was 3 phase power, 24V DC and ethernet connection.
- Distributed IO to all carriages for door control, including integrated safety.
- Driver control at each end of the train so train could be driven in either direction.
- Driver controls designed to be fool proof and eliminate the human factor from the safety performance levels.
- System incorporated automatic doors with secondary locking and monitoring.
Full risk analysis was performed on the control system in order to satisfy the requirements of EN13849.